Las demandas de producción en la industria automotriz cambian con rapidez, ya que la aparición de nuevos modelos de vehículos y el aumento de las opciones de personalización obligan a realizar ajustes frecuentes en las líneas de producción. Los brazos robóticos industriales tradicionales son eficaces en la ejecución de tareas fijas y repetitivas; sin embargo, cuando se enfrentan a carteras de productos diversas, pequeñas variaciones en la posición de las piezas o situaciones imprevistas, suelen requerir procesos de reprogramación y calibración largos y costosos, careciendo de flexibilidad y adaptabilidad en tiempo real.

Con el aumento del trabajo conjunto entre humanos y robots en espacios compartidos, la colaboración (cobots) se ha convertido en un tema clave. Garantizar la seguridad de las personas en entornos dinámicos es fundamental, lo que exige que los brazos robóticos perciban de manera precisa e inmediata el entorno circundante y los movimientos humanos, y reaccionen al instante (por ejemplo, desacelerando o deteniéndose). Los sistemas de seguridad existentes a veces tienen dificultades para alcanzar la velocidad de respuesta y la precisión requeridas.
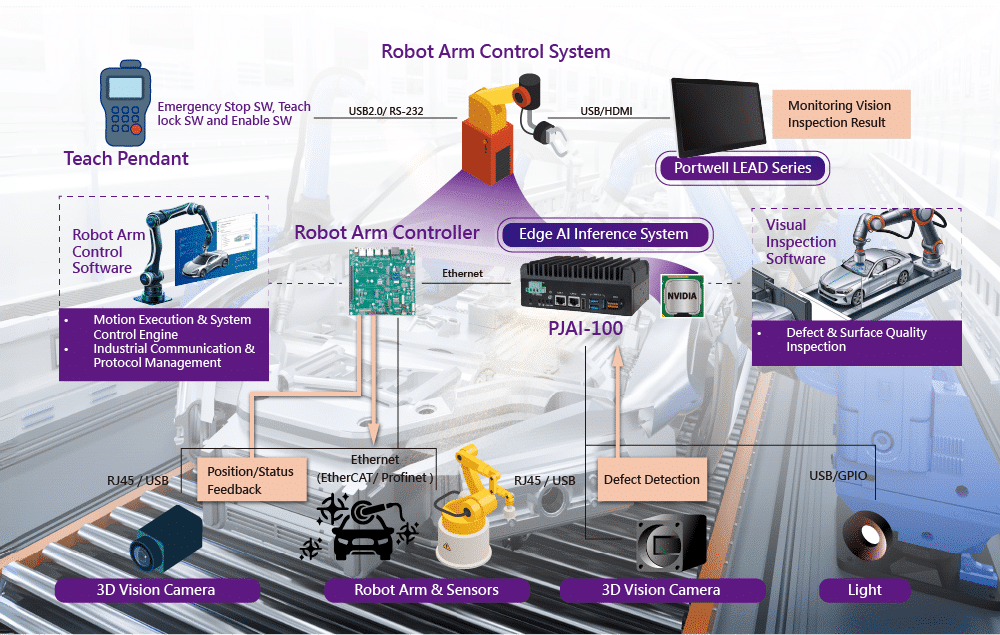
Las operaciones de los brazos robóticos dependen cada vez más de diversos sensores (como visión, fuerza, entre otros) para percibir el entorno y el estado de las piezas de trabajo. Los métodos de procesamiento tradicionales presentan una latencia elevada. Cómo integrar de forma eficaz la gran cantidad de datos procedentes de sensores con diferentes orígenes y formatos, y cómo inferir rápidamente esa información y convertirla en una base para la toma de decisiones en tiempo real por parte del brazo robótico, sigue siendo un desafío complejo.
Para componentes automotrices dispuestos de forma aleatoria (como engranajes y rodamientos) sobre una cinta transportadora, o para pequeñas piezas estampadas dispersas en un contenedor, el sistema de visión puede identificar rápidamente la posición y la orientación del objeto objetivo, guiando al brazo robótico para agarrarlo con precisión y colocarlo en la posición designada. Esta aplicación se utiliza ampliamente en la clasificación logística y en las operaciones de carga y descarga de componentes automotrices en las líneas de producción.
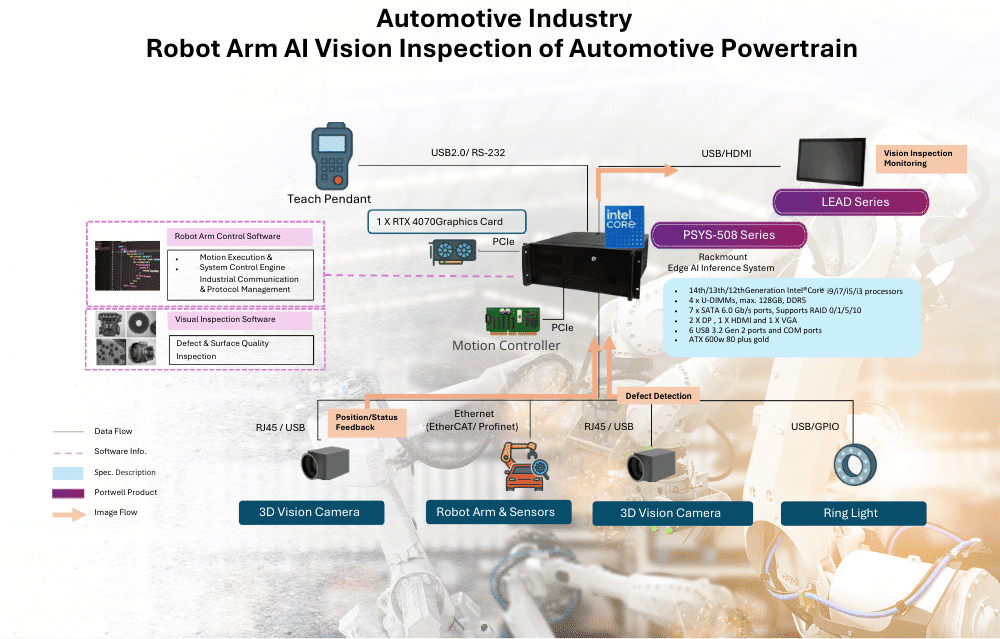
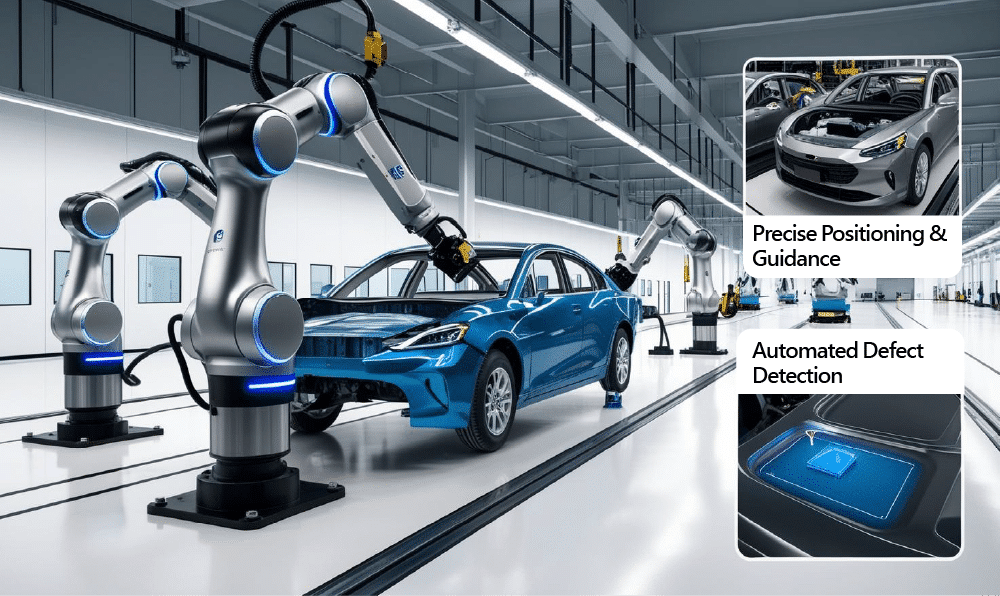
En las líneas de ensamblaje final de automóviles, el sistema de visión guía al brazo robótico para realizar tareas como la aplicación de sellador y la instalación de parabrisas, la alineación precisa de módulos del tablero, el atornillado de los asientos a la carrocería y el ensamblaje de alta precisión de trenes motrices como motores y transmisiones. El sistema puede compensar de forma instantánea pequeños desplazamientos y desviaciones angulares de las piezas de trabajo, garantizando la precisión y la tasa de éxito del ensamblaje.
En procesos de fabricación continua como la soldadura láser, la aplicación de selladores y el rociado de recubrimientos anticorrosivos en el chasis de las carrocerías automotrices, el sistema de visión puede identificar los bordes, cordones de soldadura o líneas características de los paneles de la carrocería. De este modo, guía al brazo robótico para trabajar con precisión a lo largo de superficies curvas 3D complejas, garantizando la exactitud de la trayectoria de procesamiento y la uniformidad del recubrimiento, incluso cuando existen variaciones en la forma o la posición de las piezas de trabajo.
El sistema de visión puede localizar piezas en bruto, como bloques de motor y cigüeñales automotrices, sobre palés o cintas transportadoras, guiando al brazo robótico para introducirlas con precisión en equipos como centros de mecanizado CNC y máquinas de fundición a presión. Posteriormente, también permite retirar los productos terminados tras el procesamiento, haciendo posible el ciclo automatizado de las unidades de procesamiento de componentes automotrices.

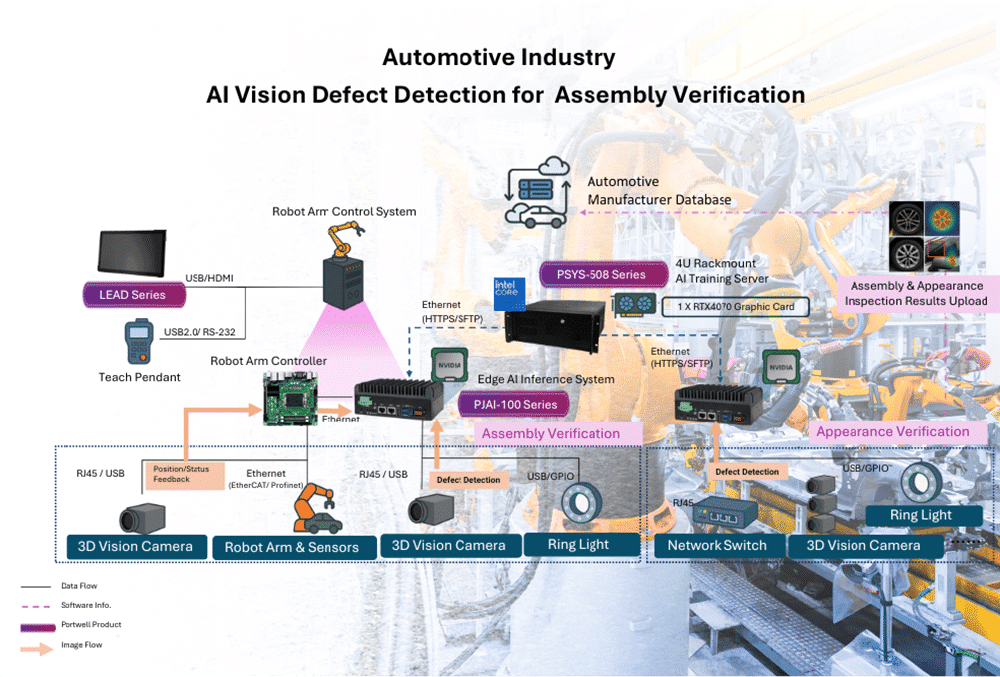
Detección de defectos comunes en las superficies pintadas de la carrocería automotriz, como piel de naranja, escurrimientos, diferencias de color, arañazos y partículas; identificación de abolladuras y suciedad en superficies de plástico o cuero de componentes interiores como tableros y paneles de puertas; así como el cribado de defectos en piezas exteriores como llantas y lámparas.
Se utiliza comúnmente en la fabricación automotriz para la inspección en línea de las dimensiones clave del Body-in-White, la medición de holguras y planitud entre puertas y capós, y para garantizar la precisión de la estructura de la carrocería.
Verificación de si los productos automotrices están ensamblados correctamente, como comprobar si las distintas uniones de tuberías y fijaciones en el compartimento del motor están correctamente instaladas, y si componentes críticos de seguridad como airbags y sensores faltan o están mal instalados.
Comprobación de si los códigos de barras, códigos QR, códigos Data Matrix o el Número de Identificación del Vehículo (VIN) grabado con láser en los componentes son claros y legibles, garantizando la trazabilidad del proceso de producción.
Con el creciente número de unidades de control electrónico (ECU), sistemas de infoentretenimiento a bordo (IVI) y módulos de cámaras y sensores de sistemas avanzados de asistencia al conductor (ADAS) en los automóviles, la calidad de las soldaduras de las PCB, los pines de los conectores y la precisión en la colocación de los componentes requieren un control estricto por parte del sistema de visión.
Inspección de la apariencia y el tamaño de las soldaduras (soldaduras por puntos y soldaduras láser) en la estructura de la carrocería para determinar si existen defectos como soldaduras omitidas, soldaduras frías o perforaciones; así como la verificación de que la aplicación del sellante sea continua, uniforme y cumpla con los estándares de ancho establecidos.